Решение контактных задач в
программном комплексе ИСПА
В данной статье речь
пойдет о возможностях системы ИСПА при решении контактных задач. Для получения
достоверного решения большого числа объектов требуется решить контактную задачу
в плоской или пространственной постановке. В качестве примера рассмотрим
процесс деформирования поршня рис 1. Существуют разные подходы к решению данной
задачи. В ИСПА разработан следующий алгоритм для решения данной задачи.
рис 1
С
помощью автоматического генератора объемных сеток пользователь создает
конечно-элементную модель поршня. Далее нужно создать абсолютно-жесткие стержни,
работающие на растяжение-сжатие, которые сходятся к оси пальца. Процесс создания
стержней автоматизирован. Для этого необходимо указать точку на оси пальца, направление
оси пальца и грань или группу граней моделирующих отверстие. Для дальнейшей удобной
работы стержни нужно создать в отдельной сетке. Результат представлен на рис 2.
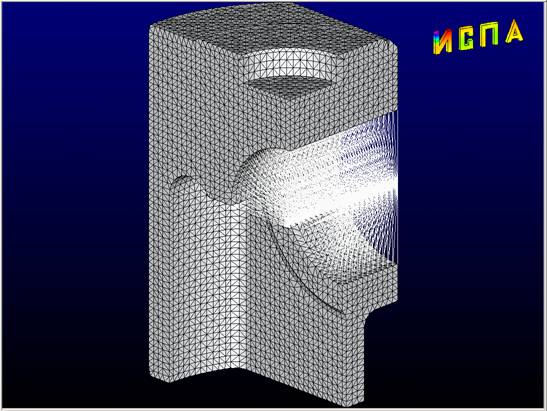
рис 2
Дальнейшие
действия следующие. Для моделирования пальца необходимо создать стержневые
элементы вдоль его оси. Вручную это
делать утомительно, поэтому данный процесс автоматизирован. Для этого
необходимо указать начальный и конечный узел на оси пальца. Программа автоматически
соединит узлы в единое целое. Результат представлен на рис 3.
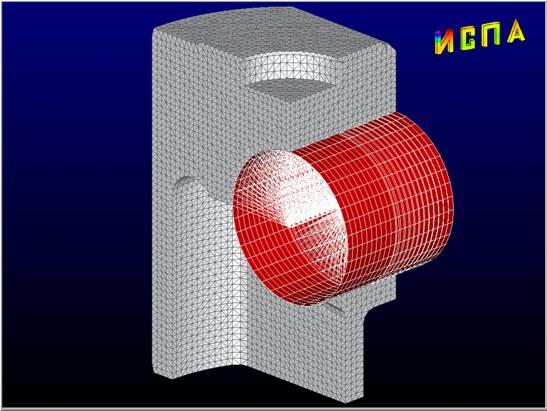
рис 3
Задав
граничные условия, закрепление, нагружение, условия симметрии пользователь решает
статическую задачу. На рисунке 4 показана конечно-элементная модель с граничными
условиями, которая подается на расчет.
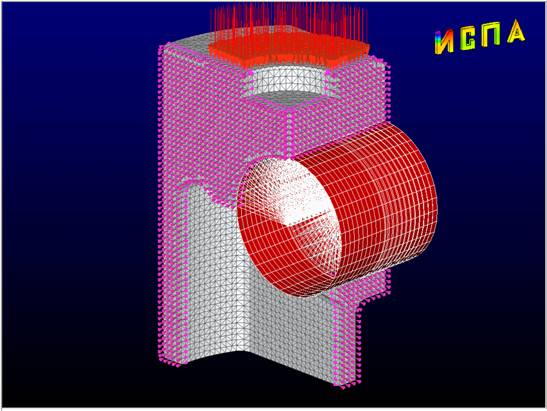
рис 4
После
проведения статического расчета программа автоматически удаляет стержни, работающие
на растяжение. Далее нужно опять провести статический расчет и удалить стержни,
работающие на растяжение. Данную последовательность действий нужно повторять до
тех пор, пока не останется стержней работающих на растяжение. Для данной модели
понадобилось проведение 4 итераций. Результаты проведенной работы в виде
деформированного состояния поршня представлены на рисунке 5.
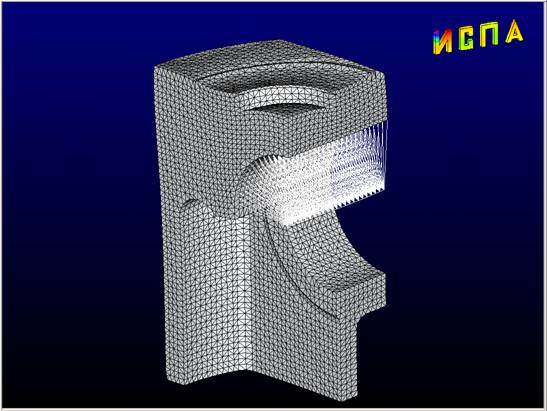
рис 5
Расчеты
в системе ИСПА удобно проводить на графических ускорителях. Время решения
уравнений данной задачи составляет 2 сек.
Июнь
2010 г.